The DeltaV Model Predictive Control Professional (MPCPro) function block allows large interactive processes (as large as 40×80) to be controlled within measurable operating constraints while accounting for process interaction and measurable disturbances. Use the MPCPro block instead of the MPC block if the application size exceeds 8×8 or the application requires more optimization than Constraint pushing (provided by the MPC block). An embedded optimizer is included with the MPCPro block. The optimizer can be used to effectively provide maximum profit or lowest cost production within the process constraints and limits on process inputs.
The MPCPro function block can replace traditional control systems that use feedforward, decoupling networks, and override for multivariable control. The parameters of the MPCPro function block are configured in Control Studio. When a module that contains the MPCPro block is downloaded, all inputs and outputs used by the MPCPro block are automatically assigned to the Continuous Historian.
The history collection rate of the MPCPro function block parameters is defined as part of the block configuration.
You use the DeltaV PredictPro application to commission the MPCPro block, to easily determine the process step response, and to automatically test the process. Using the historical data that reflects automatic or manual process testing, the PredictPro application can automatically identify the process step responses. The control definition used by the MPCPro function block can be generated from the model that is identified. The PredictPro Simulation application can be used to verify the control before it is used in your process.
The operator runs the control through a DeltaV Operate screen built with the MPCPro dynamos.
The MPCPro function block supports modes and status handling.
The MPCPro function block is not supported in composites.
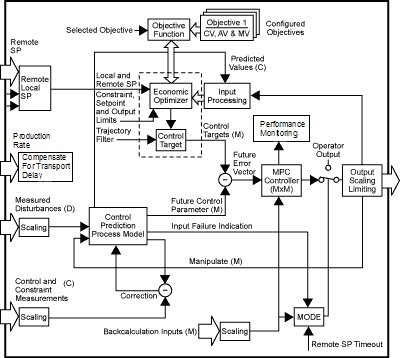
The function blocks that provide the MPCPro inputs and outputs (AI scaler, AO, PID, Ratio, Fuzzy, Bias/Gain, Splitter, and other MPCPro function blocks) can reside in the same module as the MPCPro block or in other modules. Use the Scaler function block as the MPCPro reference when another function block that does not support scaling (such as a Calc/Logic function block) is referenced as an input to the MPCPro function block. Insert the Scaler function block after the Calc/Logic block and reference the Scaler output in the MPCPro function block. This provides the appropriate parameter (OUT_SCALE) for the input parameters reference by the MPCPro block. The path for Controlled, Manipulated, Disturbance, and Constraint parameters must ultimately point to a reference that is resolved. For example, if the parameter path points to the OUT parameter of a Scalar block; the IN parameter of the Scalar must be wired to a parameter associated with a resolved reference. Specifically, the scalar should not be wired to a DST that contains an invalid IO reference nor wired to a dynamic reference that can become unresolved. Refer to the following figure, MPCPro Function Block, and notice that the MPCPro block has no input and output connections. The user configures the MPCPro block in DeltaV Control Studio to directly reference function block inputs or outputs.